Re-spinning three ECUs.
Shrinking. Simplifying. Shipping.
Every season the electrical leads push to better improve the electrical system of the car. My job as LV Electronics Lead is to design, manufacture, and test the Electronic Control Units (ECUs) which come in the form of PCBs, designed entirely by my sub-team of 6 and I.
For 2024–25, I am re-spinning the LV Controller, Front Controller, and Raspberry Pi Hat boards. The core changes involve shrinking the boards, adding sensor support requested by the mechanical team, and implementing CAN Flash allowing software to be flashed to all STM32 microcontrollers through a single connection point.
Three boards. One car.
Every board is designed by my sub-team from schematic to final manufactured PCB. Click any board to see what it does and what changed this season.
The LV Controller is the ECU responsible for managing startup of the LV system, housing control for sensors, vehicle lights, shutdown circuitry, and more.
- Communication to LV BMS + current monitoring
- HV DCDC control
- PWM control of pumps and radiator fans
- Shutdown circuit connections (motor interlocks, roll hoop button)
- Ready-to-Move (RTM) light + TSSI (software)
- Powering IMU, GPS, Raspberry Pi, and other sensors
LV Power Circuitry Redesign
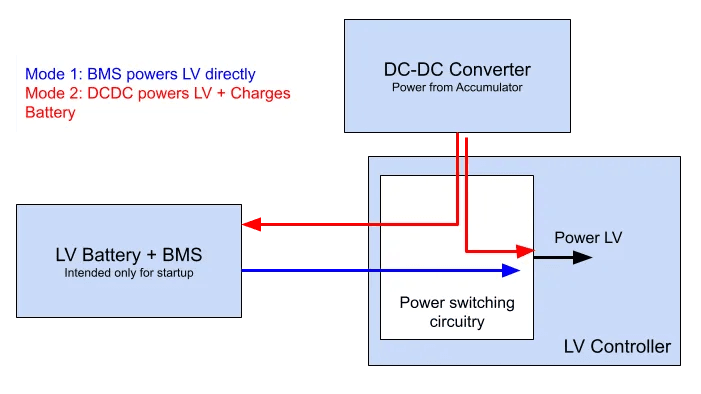
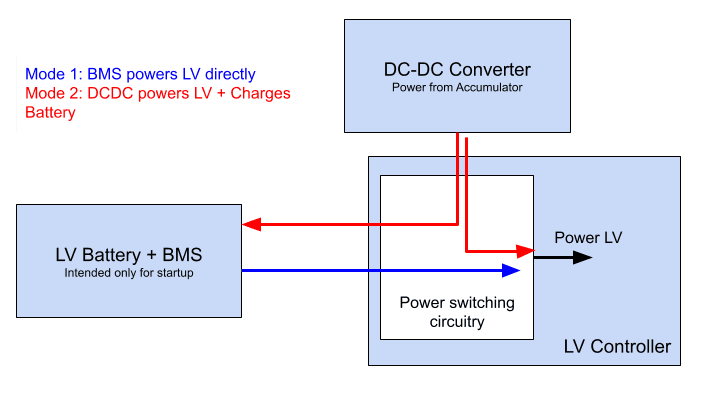
The most significant change this season. The old LV controller used an external battery pack with a complicated power multiplexer. This year we're moving to a custom LV battery which means current needs to flow back into the battery for charging. That changes everything about the power topology.
The existing power multiplexer chose between battery and DCDC power but it only allowed current to flow out of the battery. With a custom LV battery + BMS, we need current to flow back in for charging too.
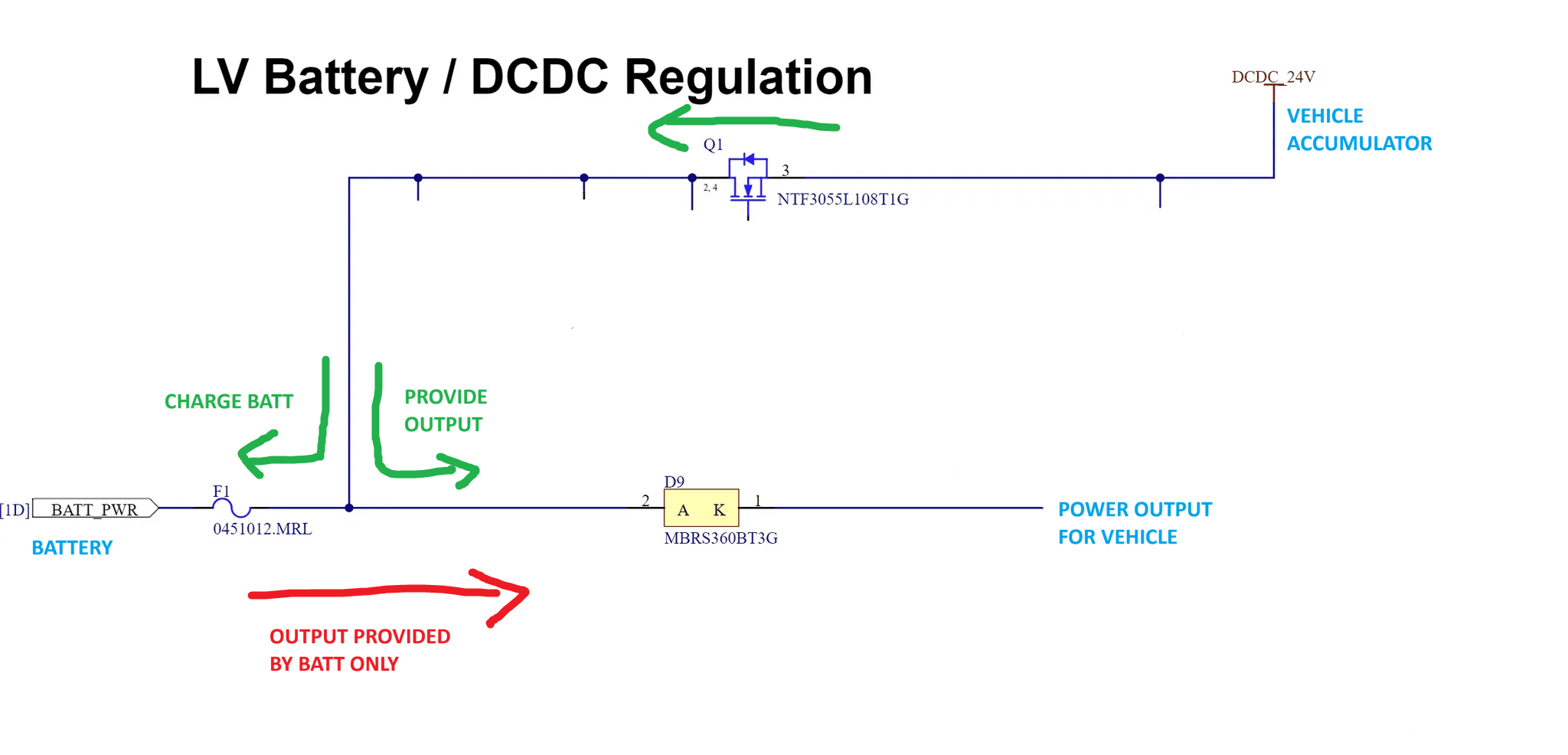
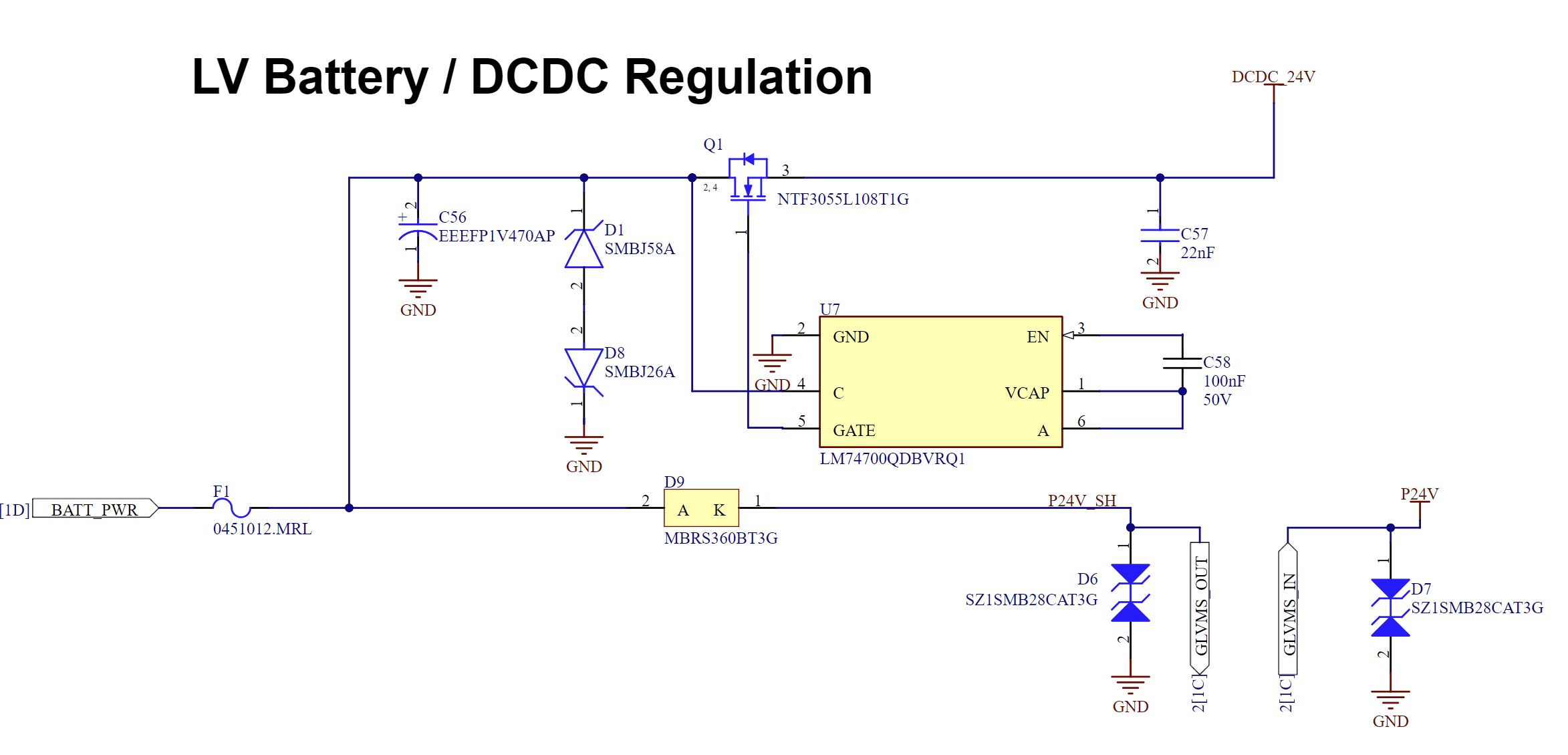
An ideal diode controller (LM74700) a MOSFET-based circuit that mimics a diode with near-zero voltage drop. Battery powers startup; when DCDC turns on at higher potential, it automatically powers the LV system and charges the battery. No software. No switches. Just physics.
Measured: 0.16V
Measured: 23.98V
Measured: CONFIRMED
How it all fits together
The three PCBs are nodes in a broader electrical architecture that the LV team has been developing over several seasons. The LV Controller, Front Controller, and RPi Hat all communicate over two separate CAN buses Vehicle CAN and Powertrain CAN.